d3-delaunay

Georgy “The Voronator” Voronoy
This is a fast, no-dependency library for computing the Voronoi diagram of a set of two-dimensional points. It is based on Delaunator, a fast library for computing the Delaunay triangulation using sweep algorithms. The Voronoi diagram is constructed by connecting the circumcenters of adjacent triangles in the Delaunay triangulation.
For an interactive explanation of how this library works, see The Delaunay’s Dual.
Installing
To install, npm install d3-delaunay or yarn add d3-delaunay. You can also download the latest release or load directly from unpkg. AMD, CommonJS, ES5 and ES6+ environments are supported. In vanilla, a d3 global is exported.
import {Delaunay} from "d3-delaunay";
const points = [[0, 0], [0, 1], [1, 0], [1, 1]];
const delaunay = Delaunay.from(points);
const voronoi = delaunay.voronoi([0, 0, 960, 500]); API Reference
Delaunay
new Delaunay(points) Source
Returns the Delaunay triangulation for the given flat array [x0, y0, x1, y1, …] of points.
const delaunay = new Delaunay(Float64Array.of(0, 0, 0, 1, 1, 0, 1, 1));
Delaunay.from(points[, fx[, fy[, that]]]) Source
Returns the Delaunay triangulation for the given array or iterable of points. If fx and fy are not specified, then points is assumed to be an array of two-element arrays of numbers: [[x0, y0], [x1, y1], …]. Otherwise, fx and fy are functions that are invoked for each element in the points array in order, and must return the respective x- and y-coordinate for each point. If that is specified, the functions fx and fy are invoked with that as this. (See Array.from for reference.)
const delaunay = Delaunay.from([[0, 0], [0, 1], [1, 0], [1, 1]]);
delaunay.points
The coordinates of the points as an array [x0, y0, x1, y1, …]. Typically, this is a Float64Array, however you can use any array-like type in the constructor.
delaunay.halfedges
The halfedge indexes as an Int32Array [j0, j1, …]. For each index 0 ≤ i < halfedges.length, there is a halfedge from triangle vertex j = halfedges[i] to triangle vertex i. Equivalently, this means that triangle ⌊i / 3⌋ is adjacent to triangle ⌊j / 3⌋. If j is negative, then triangle ⌊i / 3⌋ is an exterior triangle on the convex hull. For example, to render the internal edges of the Delaunay triangulation:
const {points, halfedges, triangles} = delaunay;
for (let i = 0, n = halfedges.length; i < n; ++i) {
const j = halfedges[i];
if (j < i) continue;
const ti = triangles[i];
const tj = triangles[j];
context.moveTo(points[ti * 2], points[ti * 2 + 1]);
context.lineTo(points[tj * 2], points[tj * 2 + 1]);
} See also delaunay.render.
delaunay.hull
An arbitrary node on the convex hull. The convex hull is represented as a linked list of nodes, which each node being an object with the following properties:
- node.i - the index of the associated point
- node.x - the x-coordinate of the associated point
- node.y - the y-coordinate of the associated point
- node.t - the index of the (incoming or outgoing?) associated halfedge
- node.next - the next node on the hull
- node.prev - the previous node on the hull
See also delaunay.renderHull.
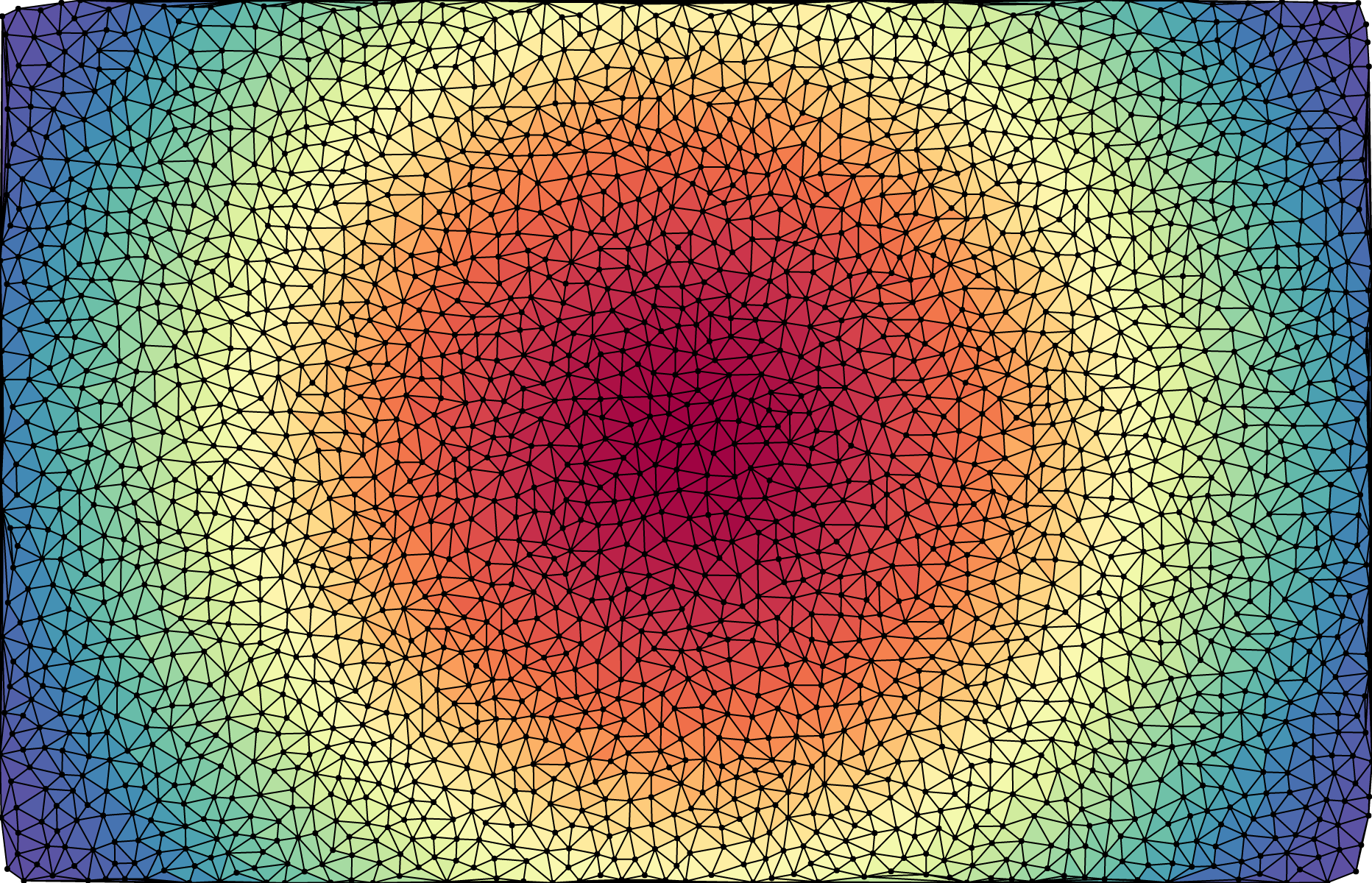
delaunay.triangles
The triangle vertex indexes as an Uint32Array [i0, j0, k0, i1, j1, k1, …]. Each contiguous triplet of indexes i, j, k forms a counterclockwise triangle. The coordinates of the triangle’s points can be found by going through delaunay.points. For example, to render triangle i:
const {points, triangles} = delaunay;
const t0 = triangles[i * 3 + 0];
const t1 = triangles[i * 3 + 1];
const t2 = triangles[i * 3 + 2];
context.moveTo(points[t0 * 2], points[t0 * 2 + 1]);
context.lineTo(points[t1 * 2], points[t1 * 2 + 1]);
context.lineTo(points[t2 * 2], points[t2 * 2 + 1]);
context.closePath(); See also delaunay.renderTriangle.
delaunay.inedges
The incoming halfedge indexes as a Int32Array [e0, e1, e2, …]. For each point i, inedges[i] is the halfedge index e of an incoming halfedge. For coincident points, the halfedge index is -1; for points on the convex hull, the incoming halfedge is on the convex hull; for other points, the choice of incoming halfedge is arbitrary. The inedges table can be used to traverse the Delaunay triangulation; see also delaunay.neighbors.
delaunay.outedges
The outgoing halfedge indexes as a Int32Array [e0, e1, e2, …]. For each point i on the convex hull, outedges[i] is the halfedge index e of the corresponding outgoing halfedge; for other points, the halfedge index is -1. The outedges table can be used to traverse the Delaunay triangulation; see also delaunay.neighbors.
delaunay.find(x, y[, i]) Source
Returns the index of the input point that is closest to the specified point ⟨x, y⟩. The search is started at the specified point i. If i is not specified, it defaults to zero.
delaunay.neighbors(i) Source
Returns an iterable over the indexes of the neighboring points to the specified point i. The iterable is empty if i is a coincident point.
delaunay.render([context]) Source
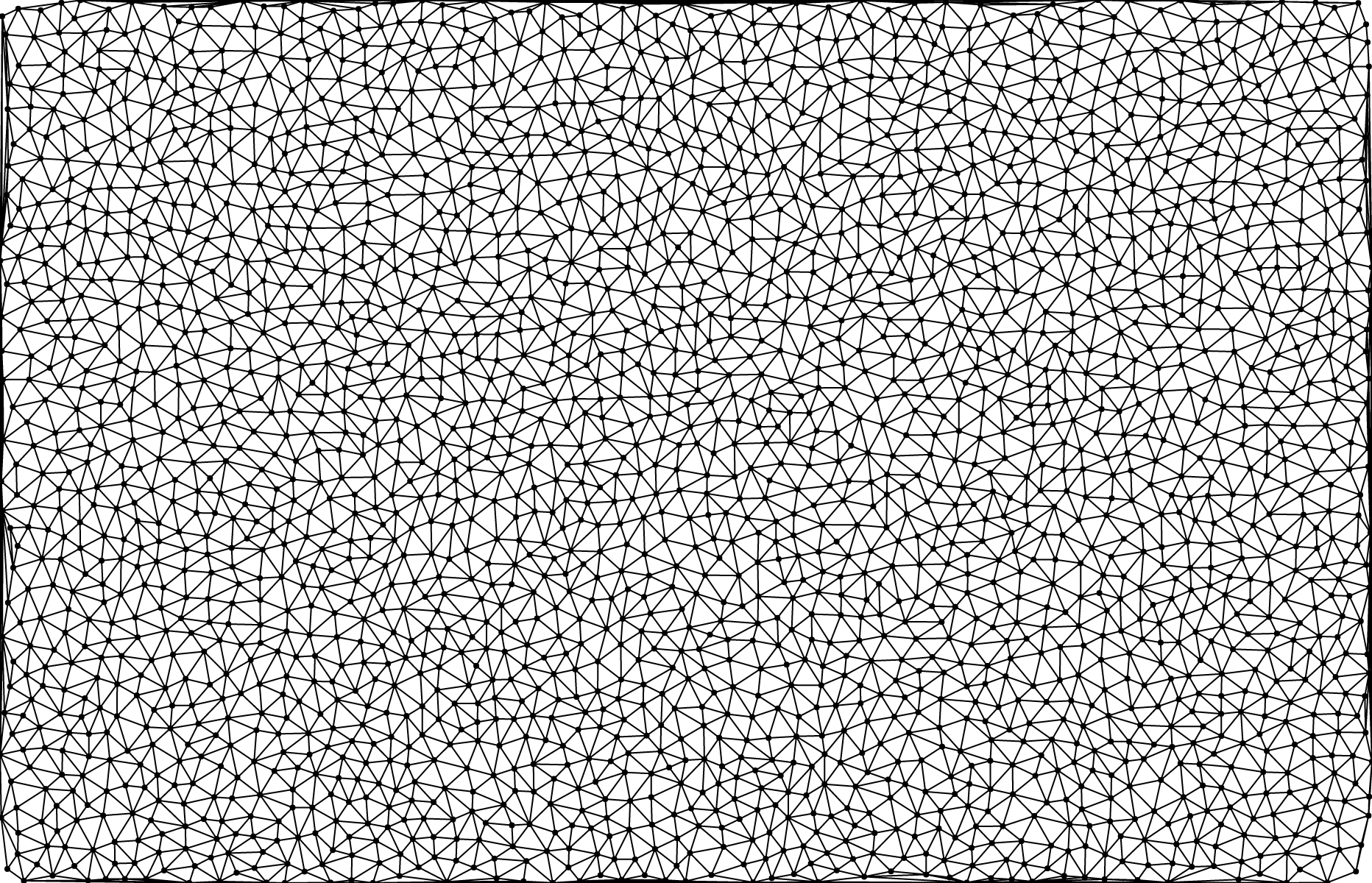
Renders the edges of the Delaunay triangulation to the specified context. The specified context must implement the context.moveTo and context.lineTo methods from the CanvasPathMethods API. If a context is not specified, an SVG path string is returned instead.
delaunay.renderHull([context]) Source

Renders the convex hull of the Delaunay triangulation to the specified context. The specified context must implement the context.moveTo and context.lineTo methods from the CanvasPathMethods API. If a context is not specified, an SVG path string is returned instead.
delaunay.renderTriangle(i[, context]) Source
Renders triangle i of the Delaunay triangulation to the specified context. The specified context must implement the context.moveTo, context.lineTo and context.closePath methods from the CanvasPathMethods API. If a context is not specified, an SVG path string is returned instead.
delaunay.renderPoints([context][, radius]) Source
Renders the input points of the Delaunay triangulation to the specified context as circles with the specified radius. If radius is not specified, it defaults to 2. The specified context must implement the context.moveTo and context.arc methods from the CanvasPathMethods API. If a context is not specified, an SVG path string is returned instead.
delaunay.hullPolygon() Source
Returns the closed polygon [[x0, y0], [x1, y1], …, [x0, y0]] representing the convex hull.
delaunay.trianglePolygons() Source
Returns an iterable over the polygons for each triangle, in order.
delaunay.trianglePolygon(i) Source
Returns the closed polygon [[x0, y0], [x1, y1], [x2, y2], [x0, y0]] representing the triangle i.
delaunay.voronoi([bounds]) Source
Returns the Voronoi diagram for the associated points. When rendering, the diagram will be clipped to the specified bounds = [xmin, ymin, xmax, ymax]. If bounds is not specified, it defaults to [0, 0, 960, 500]. See To Infinity and Back Again for an interactive explanation of Voronoi cell clipping.
Voronoi
voronoi.delaunay
The Voronoi diagram’s associated Delaunay triangulation.
voronoi.circumcenters
The circumcenters of the Delaunay triangles as a Float64Array [cx0, cy0, cx1, cy1, …]. Each contiguous pair of coordinates cx, cy is the circumcenter for the corresponding triangle. These circumcenters form the coordinates of the Voronoi cell polygons.
voronoi.vectors
An Uint64Array [vx0, vy0, wx0, wy0, …] where each non-zero quadruple describes an open (infinite) cell on the outer hull, giving the directions of two open half-lines.
voronoi.xmin
voronoi.ymin
voronoi.xmax
voronoi.ymax
The bounds of the viewport [xmin, ymin, xmax, ymax] for rendering the Voronoi diagram. These values only affect the rendering methods (voronoi.render, voronoi.renderBounds, cell.render).
voronoi.contains(i, x, y) Source
Returns true if the cell with the specified index i contains the specified point ⟨x, y⟩. (This method is not affected by the associated Voronoi diagram’s viewport bounds.)
voronoi.render([context]) Source
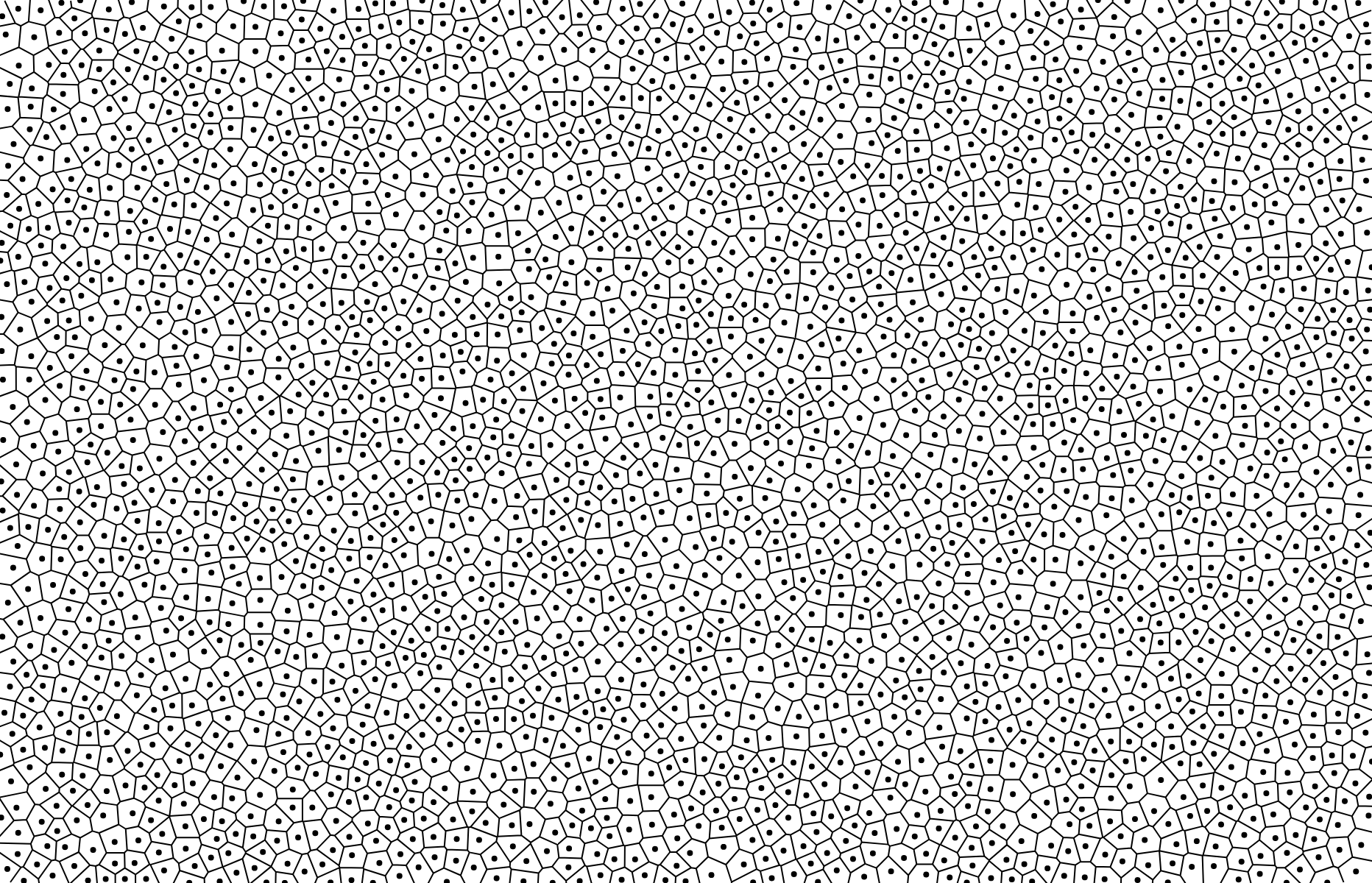
Renders the mesh of Voronoi cells to the specified context. The specified context must implement the context.moveTo and context.lineTo methods from the CanvasPathMethods API. If a context is not specified, an SVG path string is returned instead.
voronoi.renderBounds([context]) Source

Renders the viewport extent to the specified context. The specified context must implement the context.rect method from the CanvasPathMethods API. Equivalent to context.rect(voronoi.xmin, voronoi.ymin, voronoi.xmax - voronoi.xmin, voronoi.ymax - voronoi.ymin). If a context is not specified, an SVG path string is returned instead.
voronoi.renderCell(i[, context]) Source
Renders the cell with the specified index i to the specified context. The specified context must implement the context.moveTo , context.lineTo and context.closePath methods from the CanvasPathMethods API. If a context is not specified, an SVG path string is returned instead.
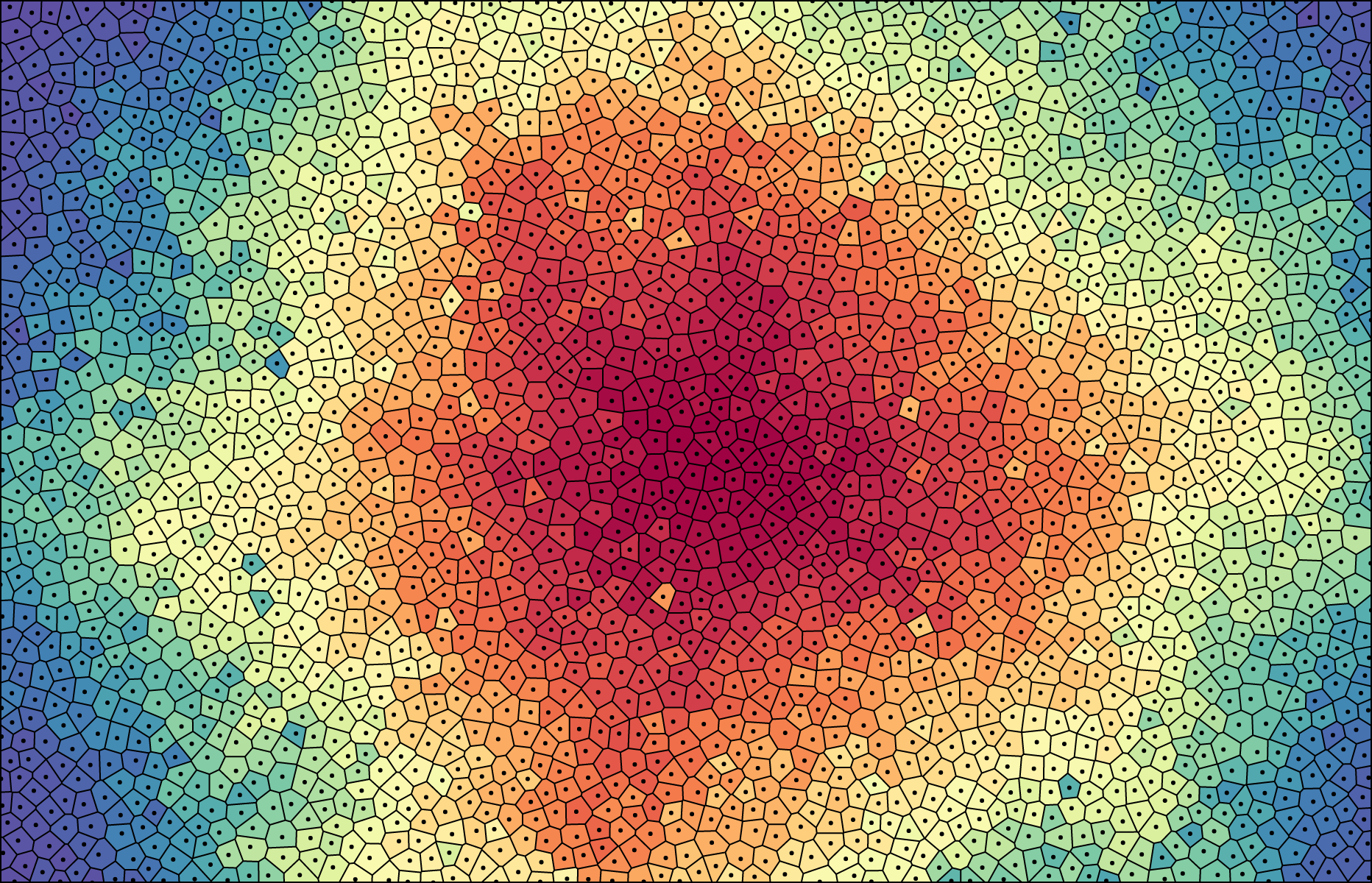
voronoi.cellPolygons() Source
Returns an iterable over the polygons for each cell, in order.
voronoi.cellPolygon(i) Source
Returns the convex, closed polygon [[x0, y0], [x1, y1], …, [x0, y0]] representing the cell for the specified point i.
© 2010–2018 Michael Bostock
Licensed under the BSD License.
https://github.com/d3/d3-delaunay